Notes
Reflections
- Consider [latex]A\,\mathbf{x}=\left(\begin{array}{c}1 & 0\\0 & -1\end{array}\right)\left(\begin{array}{c}x\\y\end{array}\right)=\left(\begin{array}{c}x\\-y\end{array}\right)[/latex]. So, matrix A here represents reflection in the x-axis (since the x-coordinate is unchanged, but the y-coordinate changes to –y).
- Consider [latex]B\,\mathbf{x}=\left(\begin{array}{c}-1 & 0\\0 & 1\end{array}\right)\left(\begin{array}{c}x\\y\end{array}\right)=\left(\begin{array}{c}-x\\y\end{array}\right)[/latex]. So, matrix B here represents reflection in the y-axis (since the x-coordinate changes to –x, but the y-coordinate is unchanged).
Rotations
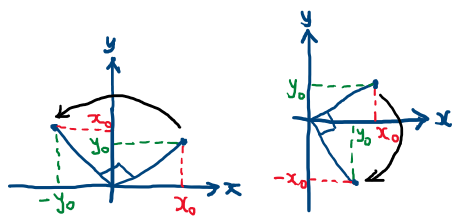
- Consider [latex]C\,\mathbf{x}=\left(\begin{array}{c}0 & -1\\1 & 0\end{array}\right)\left(\begin{array}{c}x\\y\end{array}\right)=\left(\begin{array}{c}-y\\x\end{array}\right)[/latex]. So, matrix C here represents a 90 degree rotation counter-clockwise about the origin (since the x-coordinate changes to –y, and the y-coordinate changes to x). See the diagram on the left below.
- Consider [latex]D\,\mathbf{x}=\left(\begin{array}{c}0 & 1\\-1 & 0\end{array}\right)\left(\begin{array}{c}x\\y\end{array}\right)=\left(\begin{array}{c}y\\-x\end{array}\right)[/latex]. So, matrix D here represents a 90 degree rotation clockwise about the origin (since the x-coordinate changes to y, and the y-coordinate changes to -x). See the diagram on the right below.
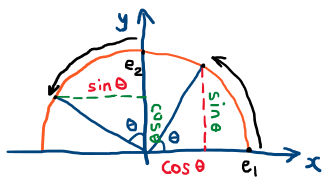
- Consider a general rotation of [latex]\theta^\circ[/latex] counterclockwise about the origin. We can derive the matrix for this transformation by considering the effects on the standard unit vectors, [latex]\mathbf{e}_1=\left(\begin{array}{c}1\\0\end{array}\right)[/latex] and [latex]\mathbf{e}_2=\left(\begin{array}{c}0\\1\end{array}\right)[/latex]. The point [latex](1, 0)[/latex] rotates to [latex](\cos\theta, \sin\theta)[/latex], while the point [latex](0, 1)[/latex] rotates to [latex](-\sin\theta, \cos\theta)[/latex]: see the diagram below. Therefore the matrix E that represents a rotation of [latex]\theta^\circ[/latex] counterclockwise about the origin is [latex]E=\left(\begin{array}{c}\cos\theta & -\sin\theta\\ \sin\theta & \cos\theta\end{array}\right)[/latex].
- For example, if [latex]\theta=90^\circ[/latex], then [latex]E=\left(\begin{array}{c}\cos(90) & -\sin(90)\\ \sin(90) & \cos(90)\end{array}\right)=\left(\begin{array}{c}0 & -1\\1 & 0\end{array}\right)[/latex].
- This technique of figuring out where e1 and e2 go to can be used to derive the matrix for any linear transformation.
Video Tips
Practice Exercises
Drag and drop the matrices below to their correct locations. Some matrices don’t fit anywhere. All rotations are counterclockwise about the origin.
